Kinova Mico Arm
Hardware
The lab owns a Mico 6DoF arm from Kinova Robotics here in Quebec. It was purchased to be mounted onto the Husky robot.
Look for a black protective case that looks like this.

Inside you'll find the arm (middle), the manual controller (bottom left) and the power supply (top right).

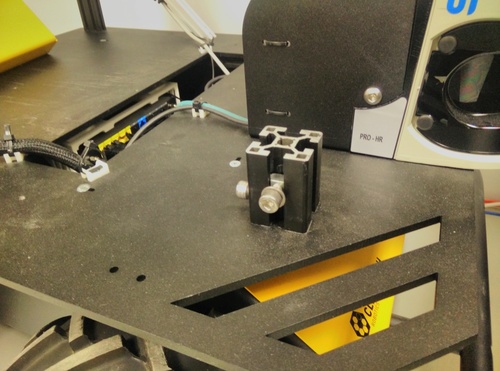
If you want to mount it on the Husky, there is a little nub of extruded aluminum at the from right of it.
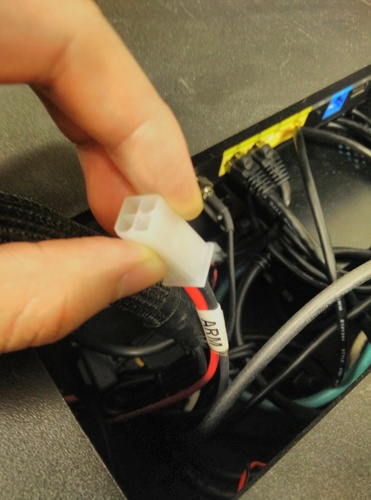
To power the arm from the Husky:
- Connect the 4 pin barrel jack to 4 pin Molex adapter to the arm

- Connect the adapter to an internal 4 pin Molex labeled as "ARM" in the husky
Software
An official ROS driver implementation is available from Kinova.
Important considerations
- Read the manual before using the arm. It contains important instructions on how to operate the arm and use the controller.